Replace mechanical handling with the Billet picker and a robot:
Bulky and noisy vibrating feeders
Steady billets flow without noise and taking up space
High maintenance costs
High durability and low maintenance
Custom design and integration
Save money on gripper design and integration
Use cases
Colin Milas forge, France
To feed the furnace, Colin Milas installed a robot with Pickit vision depositing the billets from their bin onto the infeed conveyor. The robot delivers a billet every 15 seconds, which is well within the requirements of the 30 second oven cycle times.
Forges around the world depend on reliable feeding of their induction ovens. In the past decades, mechanical feeding automation was the only solution this industry could rely on. However, these mechanical billet feeders are bulky, loud, and expensive to maintain. Due to advancements in robotics and vision, as well as our dedicated approach to tackle the bin picking problem in forging, Pickit came up with a solution. By integrating the gripper and camera, robot cells became easy to install and perform their job.
While target performance indicators will depend on your specific case, you can get an idea from our verified test results.
Scenario #1: billet 60x250 mm 12 hour run
Number of picks4089
Pick success ratio – first attempt98%
Cycle time – average10.3 s
Picks per hour – average350
Parts remaining in the bin – average1
Parts remaining in the bin – min0
Parts remaining in the bin – max3
Scenario #2: billet 110x200 mm 12 hour run
Number of picks3245
Pick success ratio – first attempt96%
Cycle time – average12.1 s
Picks per hour – average298
Parts remaining in the bin – average3
Parts remaining in the bin – min0
Parts remaining in the bin – max6
What's in the box
Hardware
Software
The hardware is powered by the latest Pickit 3D vision software, all setup and ready to go. Want to learn what else Pickit can do for you? Discover all features of the latest software update on our Knowledge Base.
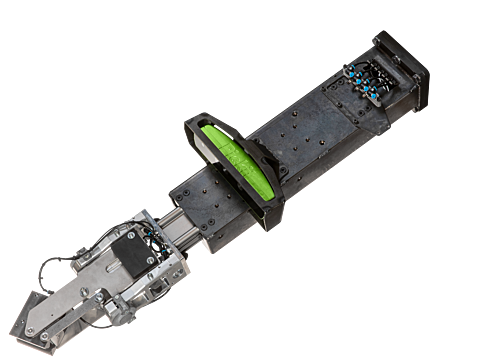
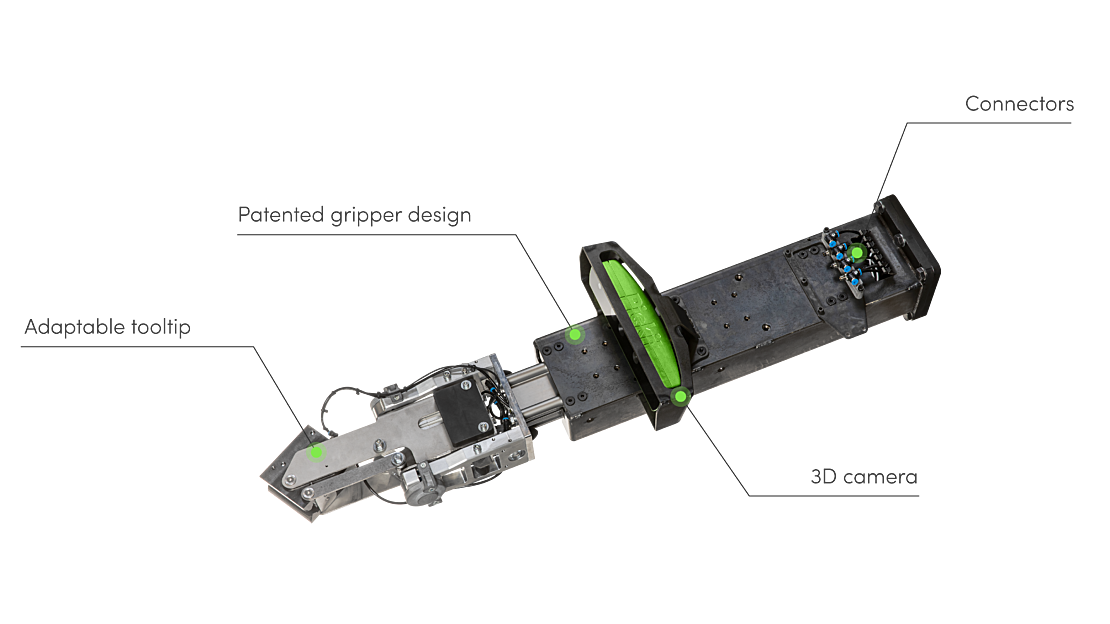
The Billet picker is an assembled End Of Arm Tool (EOAT) integrated with our Pickit 3D vision system and billet-specific software for robotic handling. You don’t have to choose between speed, accuracy, flexibility, and cost – The Billet picker ticks all the boxes.
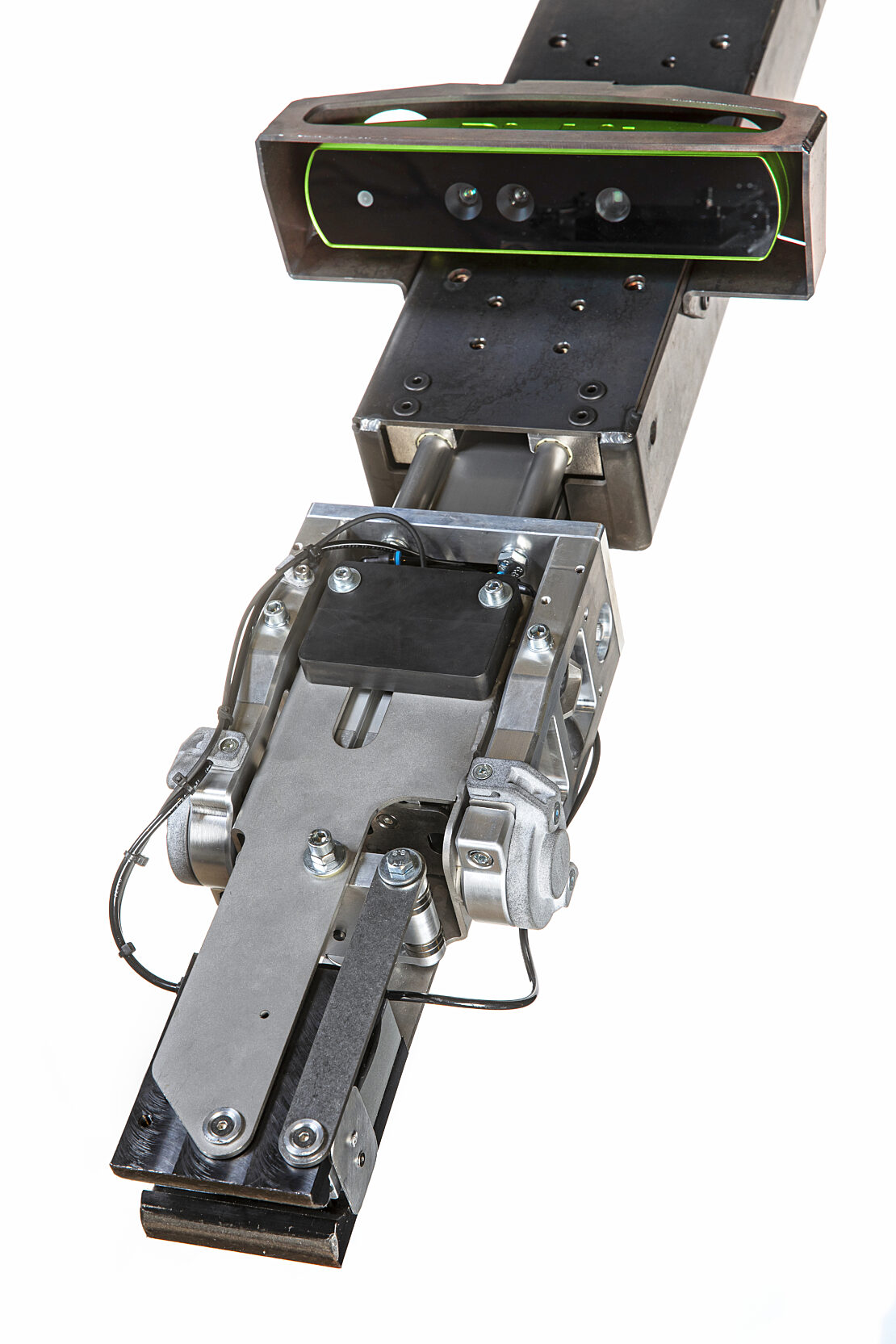
Innovative gripper
The Billet picker gripper builds on the concept of having an adaptable tooltip with a magnet mounted on a rotational axis.
This is a patent-pending technology and key enabling concept for this application.
This concept comes with the following advantages:
Maximizes the likelihood in finding a pickable part compared to a classical straight or slanted tool. This is because the tooltip (in this case, the magnet fingers) can adopt any position within a continuous range between -45 to +45 degrees, instead of only one (straight tool) or two (slanted/eccentric tool) discrete positions.
Helps to minimize the required robot workspace and footprint for the robot cell.
Simplifies the picking motions. As a consequence, there is no need for third-party motion planning software. The robot can be programmed in its native language without additional costs.
Helps to extract partly blocked parts or parts close to a bin wall thanks to the tooltip that enables billets to rotate away from the blocking parts or the bin wall when being pulled up.
The Billet picker can pick billets regardless of their position in the bin.Pick billets not only from the top but also from the sides.Pick billets that get stuck in the corners.
In addition to the adaptable tooltip, the billet gripper comes with the following functionality:
An active mechanism to block the adaptable tooltip in a fixed, known position. This allows for accurate placement of the part.
The gripper is compliant in the approach direction to protect the gripper and robot in case of occasional collisions.
The gripper acts as a camera holder. The camera is mounted on the gripper in a rigid manner.
A sensor is integrated into the tooltip to check whether a part is picked by the gripper or not.
The Billet picker picks a buried billet and firmly locks it in place for further accurate placing.
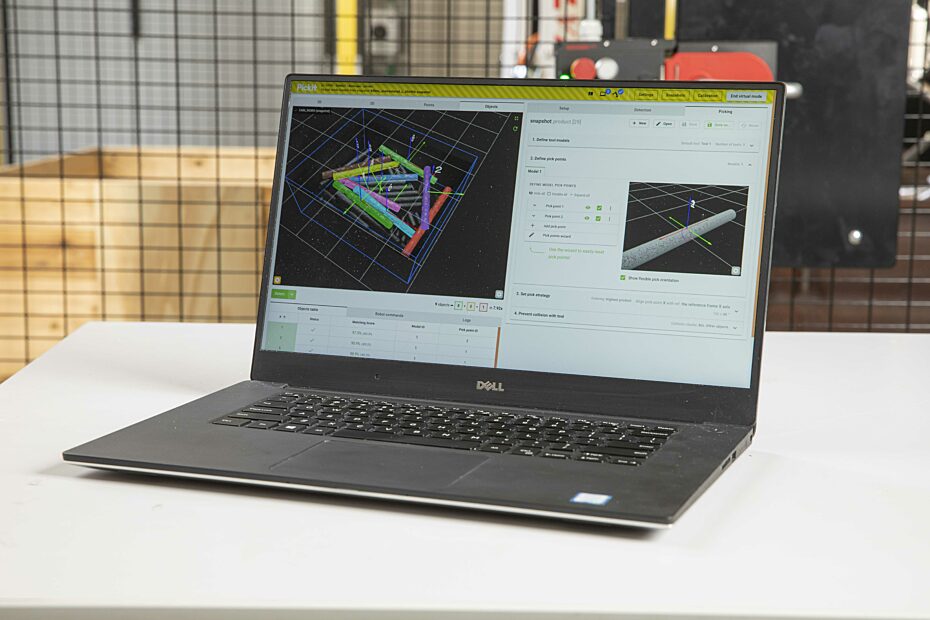
Billet-smart software
Pickit’s Billet picker comes with the Pickit software, the complete end-of-arm tool model and a pre-configured vision engine for billets. The billet dimension can be specified in our web interface or be set from the robot or PLC program. Depending on your billet size, the Pickit software will automatically select the best pick points for your billet.
A pre-configured vision engine for billets.
We performed over 500,000 picks to ensure reliability
We conducted extensive testing so you can rely day and night on uninterrupted operation with the Billet picker. For half a year, we were emptying thousands of bins with a broad range of billets, pushing reliability to the edge of what’s possible in bin picking. We completed endurance tests for hardware and full ambient lighting condition testing for the vision part. We developed a vision engine to meet this application's needs and optimized configuration to the bare minimum.
All the components and software work seamlessly together, so you can genuinely yield the benefits of robotic handling in your facility.
The Billet picker reliability test. Uninterrupted 24/7 operation.
FAQ
My billet sizes are below/above the specs for Billet picker. Can you still solve it?
Yes. We have several options to work around very big or small billets. Please contact us using the form above.
What robots can I use with the Billet picker?
Integrations for ABB, KUKA, Fanuc, and Yaskawa are already available. If you use a different robot brand – please contact us.
Will Pickit do the installation?
We do not do installations. You will need to do that yourself, or with the help of an integrator. However, we offer additional commissioning services onsite for some regions.
Why do I need a Billet picker gripper? Can’t I just buy a Pickit 3D vision system and design the gripper myself?
The Billet picker saves you time and money, eliminating the need to go through an entire EOAT development. We have been working with billet applications since 2016. We have seen many struggles on the customer side with gripper design and testing, iteration after iteration, delaying robotic cell deployment for months. Making a good gripper for billets took us many months as well, and we also made sure it works seamlessly with the camera and the software. If you do it on your own, you will need to fine-tune our standard software for the billets application.
Is there a preferred bin size? Can I keep using our own bins?
You can keep using your bins as long as you stay within the limits of the bin specs above. In case your bin has non-straight walls (>2cm deviations), we strongly recommend inserting a sheet metal plate against the inside of the bin wall to straighten the bin inside.