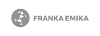
Bin Picking - Random parts
Upgrade your production line for faster time-to-market

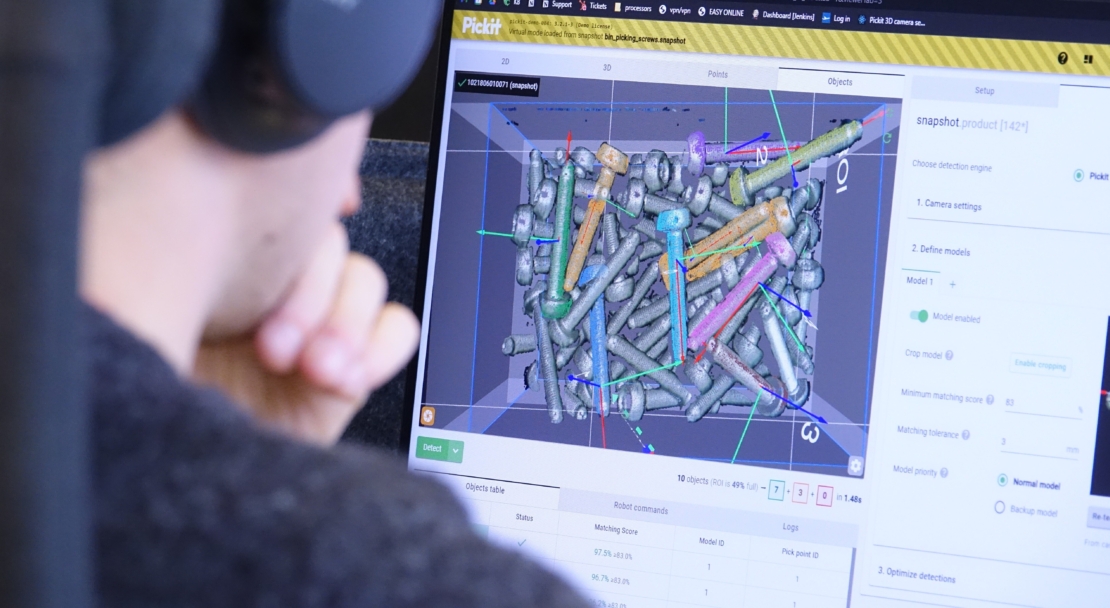
Bin picking - Billets
Get rid of noisy and costly billet feeding
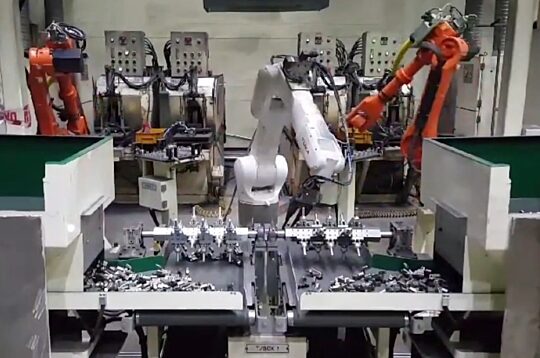
Bin Picking - Sheet metal
Stop losing time adjusting your machines when changing products

Depalletizing boxes or bags
Free your labor force from tedious and straining tasks

Surface treatment & dispensing
Intuitively handle any object on a single line
Assembly
Reduce costs and downtime caused by complex production adjustments

Get expert advice on your application
Tell us where you plan to pick from, what kind of parts, and get recommendations on the best-fit Pickit products for your application.
Works with your robot
Pickit integrates with major industrial and collaborative robot brands. You can also integrate a robot by yourself – we provide all the necessary information for integrating a new robot brand into Pickit.