URcap release 2.0: from an empty program to a running application in minutes
At Pickit we’re committed to our vision of robot vision made easy. We recently released Pickit 2.2 with many new great features and improvements, and Version 2.0 of the Pickit URCap plugin is released too. We have a lot to show!
For the Pickit URCap 2.0 we have done a full overhaul of the user experience, such that you can represent knowledge from your vision-guided pick and place application with minimal effort. Take a look at our new, easy to use yet powerful Pick and Place template.
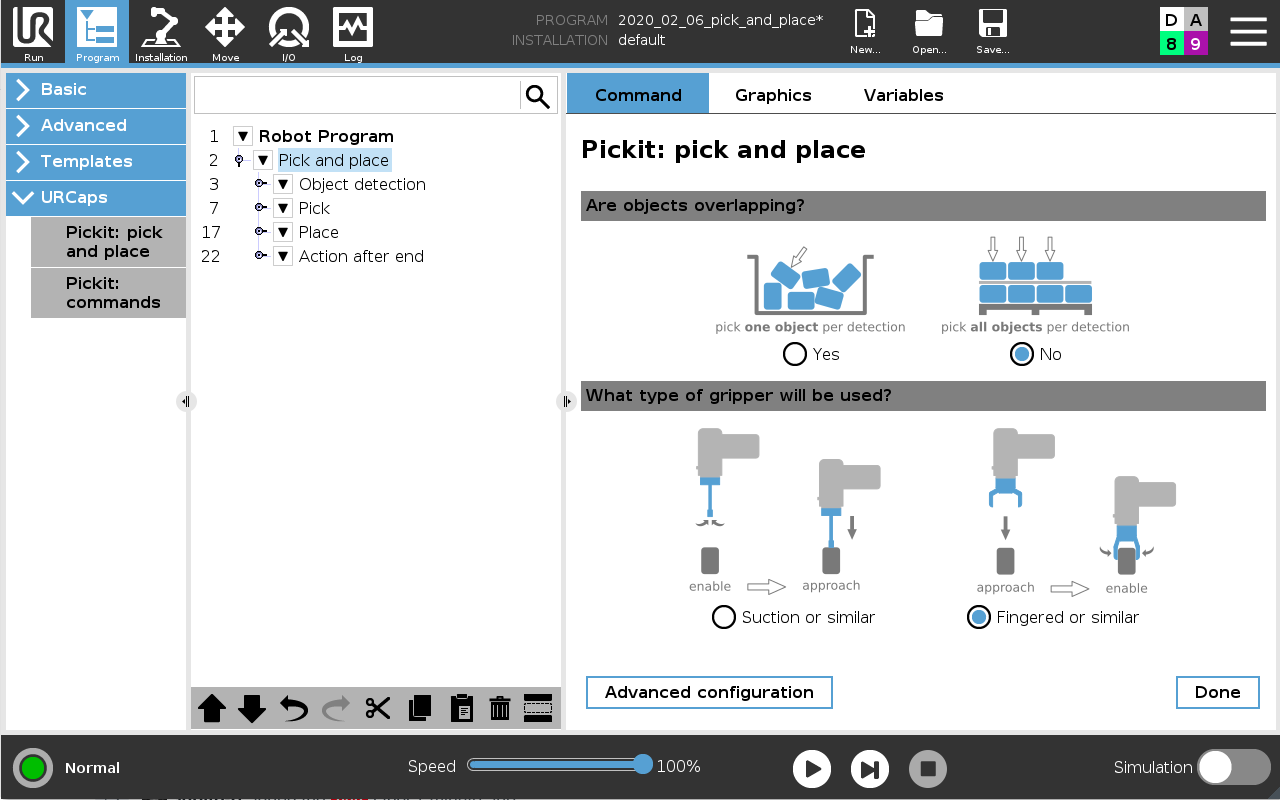
All it takes to go from an empty program to picking parts is as simple as:
- Answering two simple questions about your application.
- Selecting which Pickit configuration to use.
- Teaching three waypoints.
- Setting the tool grasp and release actions.
You can see in the above screenshot how the robot program is straight to the point. Also, the details of each sequence like object detection, pick and place is self-documenting, so you don’t need to be constantly switching back and forth between Polyscope and the documentation.
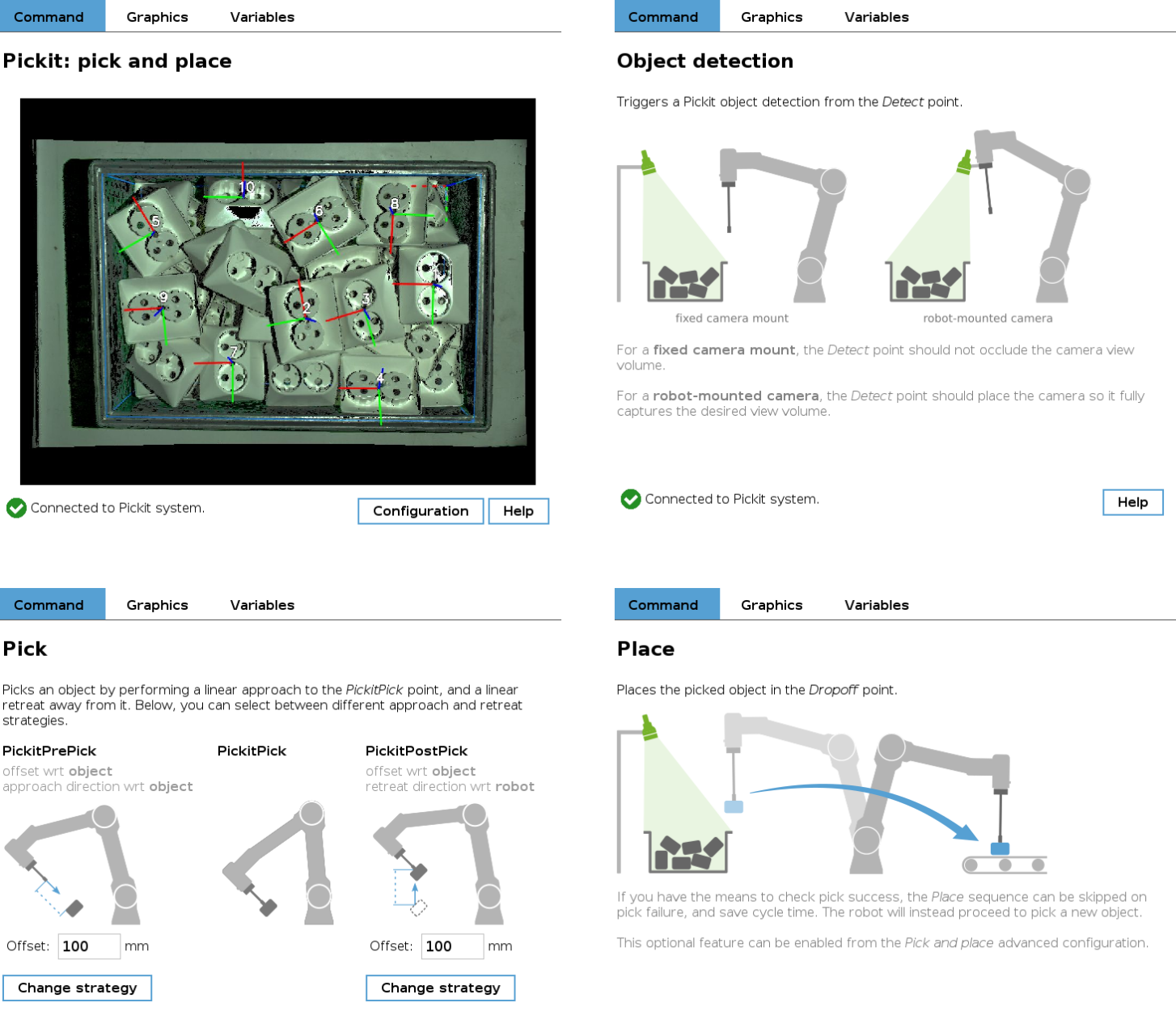
The Pickit pick and place template offers a lean user experience on top of a robust pick and place logic that scales well from simple to complex applications. So, instead of writing and debugging complex loops and conditionals to communicate at a low level with a vision system, you can focus your energy on making your pick and place application turn over fast!
And last, but not least, the Pickit URCap 2.0 is now able to automatically detect Pickit systems connected to the robot, reducing your setup time to no time.
Download the Pickit URCap 2.0 to start picking parts today!
Happy picking.
Do you have any questions? Feel free to contact us at support@pickit3d.com.
