Pickit 3.3: Adding New Robot Guidance Capabilities

The Pickit 3.3 release unlocks new capabilities of our 3D vision solution, designed to support faster, more reliable, and easier robot guidance applications. Next to bin picking and depalletization, the 3D vision platform adds capabilities for surface treatment and assembly automation. Improved detection, faster image capture and a brand new engine for reliable and precise hole detection are some of the key features customers can benefit from. As always, we developed these various improvements with our main principles in mind: performance, reliability, flexibility and user-friendliness
Why upgrade to 3.3?
Faster Image Capture with the M-HD2 Camera
With Pickit 3.3, you can now capture images up to 40% faster on average with the upgraded M-HD2 camera. This improvement in speed makes your automation processes more efficient, giving you a competitive edge in the market.

Versatility for Various Automation Scenarios
Pickit 3.3 is designed not only for bin picking but also for other automation scenarios. It includes several new features for your robots to handle surface treatment or dispensing tasks such as sanding, sealing, painting or welding. This opens up new possibilities to advance your automation projects and to streamline your processes. What’s more, the brand new hole detection engine in Pickit 3.3 allows for more reliable and precise detection of holes in the scene, making it perfect for bolting or screwing applications.
What’s new in 3.3?
Deploy Easily with Robot Guidance Example Programs
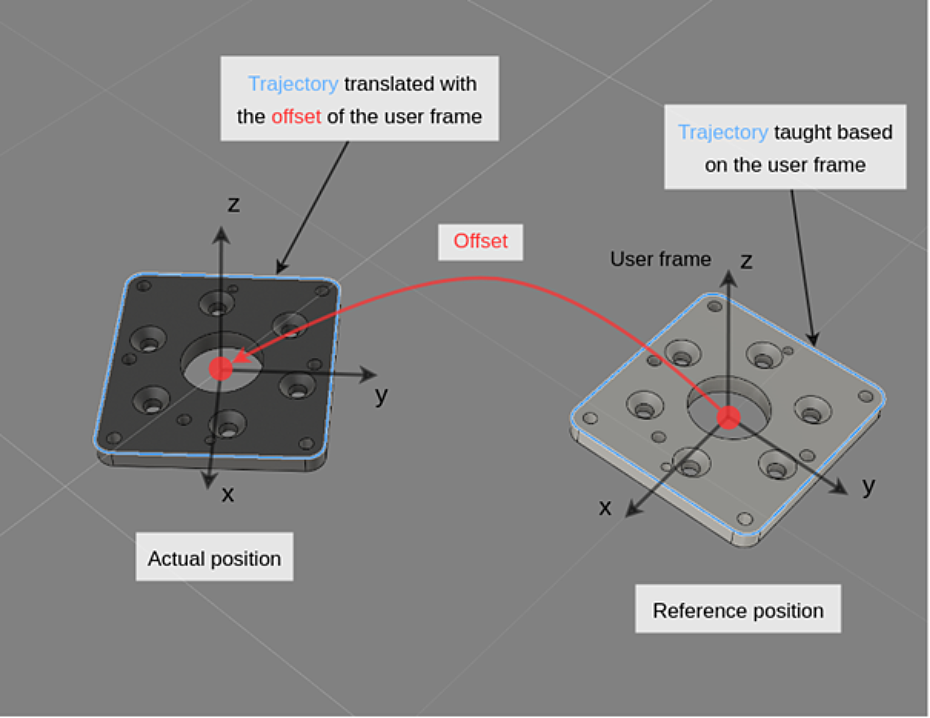
Robot guidance programs for surface treatment, dispensing, and assembly are different from pick and place or material handling programs. To allow you to easily deploy specific robot guidance applications, our 3.3 release includes example robot programs for major robot brands. These programs simplify how to use Pickit to define and update your robot's user frame. A ‘user frame’ is a user-defined coordinate system allowing the robot trajectory waypoints to remain valid even when the part location changes.
Improved and Safe Detection with Expected Object Location
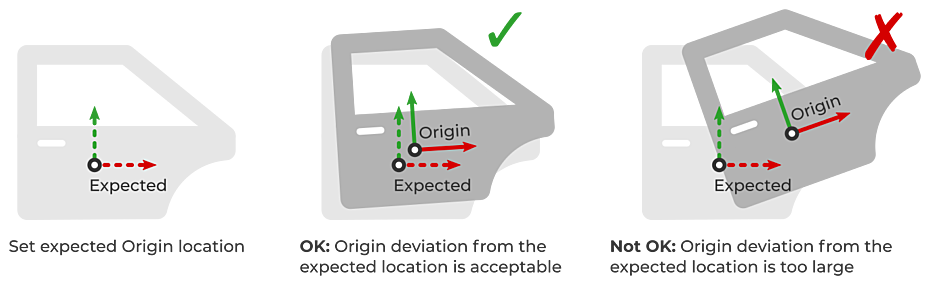
Available as a safeguard in the detection interface for all engines, Expected Object Location allows you to define information on where objects are likely to be found. Designed for single part robot guidance applications, this new feature helps to improve detection and protect the robot. The filter enables you to easily set which deviation is allowed for an object location, ensuring you can avoid unexpected tool collisions or unreachable robot motions.
New Hole Detection Engine
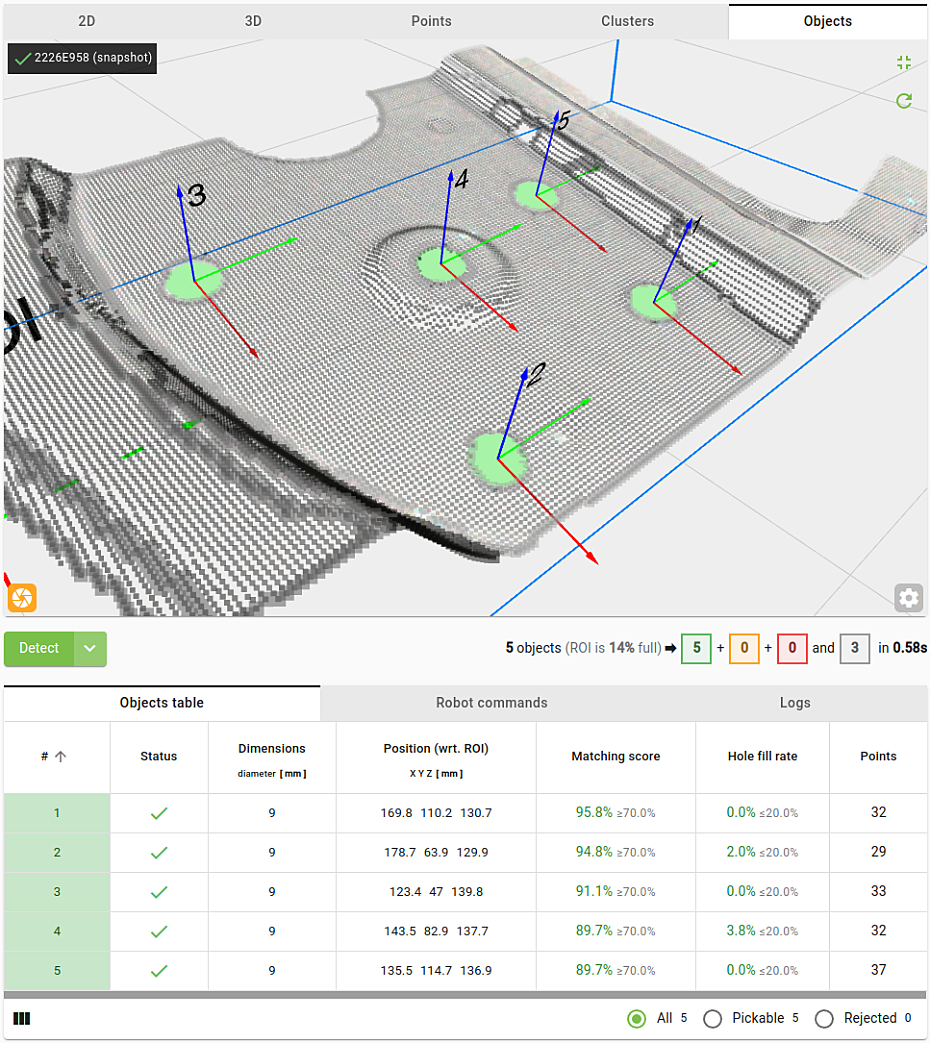
Finally, our 3.3 release comes with a brand new hole detection engine. It unlocks the power of 3D vision to reliably and precisely detect circular holes of a known size, as small as 6 mm diameters. Our solution’s hole detection capability benefits assembly applications such as bolting and screwing, as well as 3D inline measurement, for instance of car body frames.
Get the update
If you have an older Pickit version and would like to try 3.3, check out how you can upgrade your system.
Got questions?
Read 3.3 release notes in full detail or ask us anything on Pickit's 3.3 release by filling out the form below.
