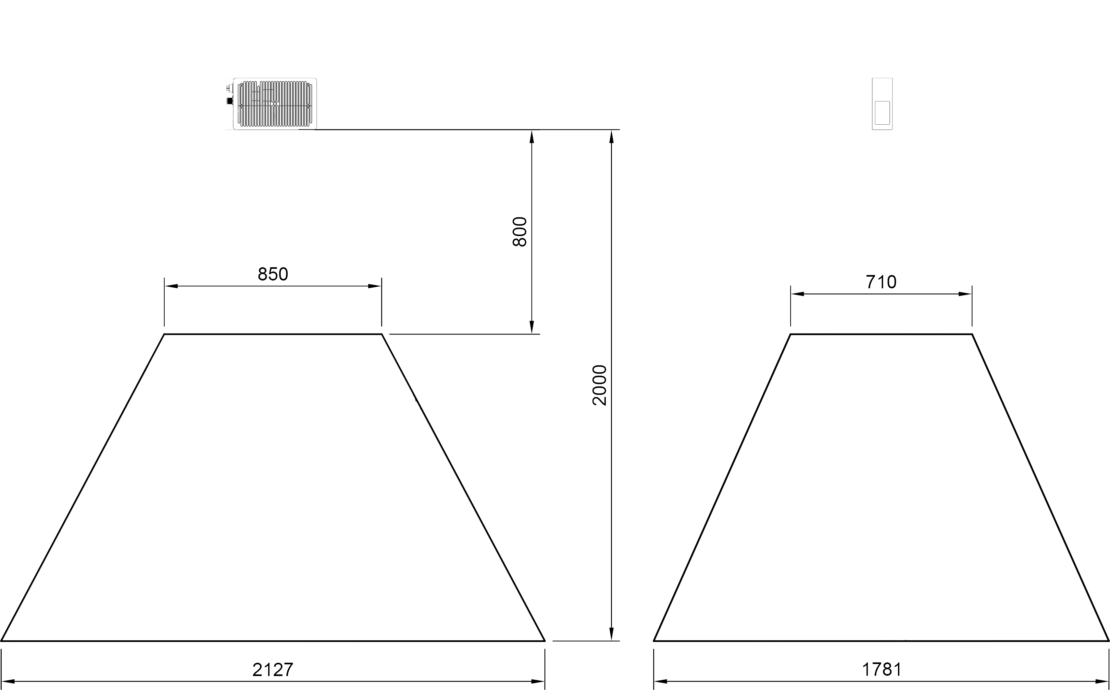
Vielfältige Standardauflösung
- Großes Sichtfeld
- Bestes Preis-/Leistungsverhältnis
- Feste Montage und am Roboterarm
Warum die SD2
-

Einsatz feste Montage und am Roboterarm
Hochzuverlässige Kamera mit Schutzklasse IP65 -

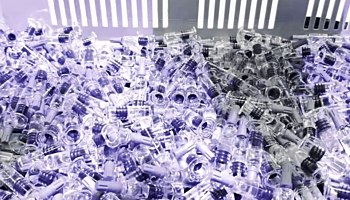
Ideal für Bin Picking und Depalettierung
Verwenden Sie die SD2 für eine breite Auswahl an Anwendungen -

Hohe Genauigkeit
3D Kamera Genauigkeit von 4-10 mm