Billet-Handling-Lösung zur Modernisierung jeder Schmiedeanlage
Ersetzen Sie das mechanische Handling durch den Billet-Picker und einen Roboter:
Sperrige und laute Vibrationsförderer
Gleichmäßiger Billetfluss ohne Lärm und Platzbedarf
Hohe Wartungskosten
Hohe Haltbarkeit und geringe Wartung
Kundenspezifisches Design und Integration
Sparen Sie Geld bei der Konstruktion und Integration von Greifern
Use cases
Colin Milas-Schmiede, Frankreich
Zur Beschickung des Ofens installierte Colin Milas einen Roboter mit Pickit-Vision, der die Billets aus ihrem Behälter auf das Einlaufband legt. Der Roboter liefert alle 15 Sekunden ein Billet, was gut innerhalb der Anforderungen der 30-Sekunden-Ofen-Zykluszeiten liegt.
Schmieden auf der ganzen Welt sind auf die zuverlässige Beschickung ihrer Induktionsöfen angewiesen. In den vergangenen Jahrzehnten war die mechanische Zuführungsautomatik die einzige Lösung, auf die sich diese Branche verlassen konnte. Diese mechanischen Billetz-Zuführungen sind jedoch sperrig, laut und teuer in der Wartung. Dank der Fortschritte in der Robotik und der Vision sowie unserer engagierten Herangehensweise an das Bin Picking-Problem in der Schmiede, hat Pickit eine Lösung gefunden. Durch die Integration des Greifers und der Kamera wurden die Roboterzellen einfach zu installieren und erfüllen ihre Aufgabe.
Während die angestrebten Leistungsindikatoren von Ihrem speziellen Fall abhängen, können Sie sich anhand unserer verifizierten Testergebnisse einen Eindruck verschaffen.
Scenario #1: billet 60x250 mm 12 hour run
Anzahl von Picks4089
Pick-Erfolgsrate – erster Versuch98%
Zykluszeit – Durchschnitt10,3 s
Picks pro Stunde – Durchschnitt350
Verbleibende Teile im Bin – Durchschnitt1
Verbleibende Teile im Bin – Minimum0
Verbleibende Teile im Bin – Maximum3
Scenario #2: billet 110x200 mm 12 hour run
Anzahl von Picks3245
Pick-Erfolgsrate – erster Versuch96%
Zykluszeit – Durchschnitt12,1 s
Picks pro Stunde – Durchschnitt298
Verbleibende Teile im Bin – Durchschnitt3
Verbleibende Teile im Bin – Minimum0
Verbleibende Teile im Bin – Maximum6
Was ist in der Box
Hardware
Software
Pickit-Kameras werden immer mit Pickit-Software geliefert. Sie können es nur zusammen als komplettes 3D-Vision-Produkt kaufen. Entdecken Sie die Funktionen unseres neuesten Software-Updates.
Das einzige bewährte Werkzeug für Bin Picking in der Schmiede
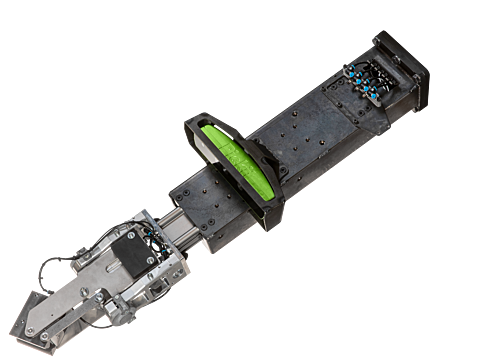
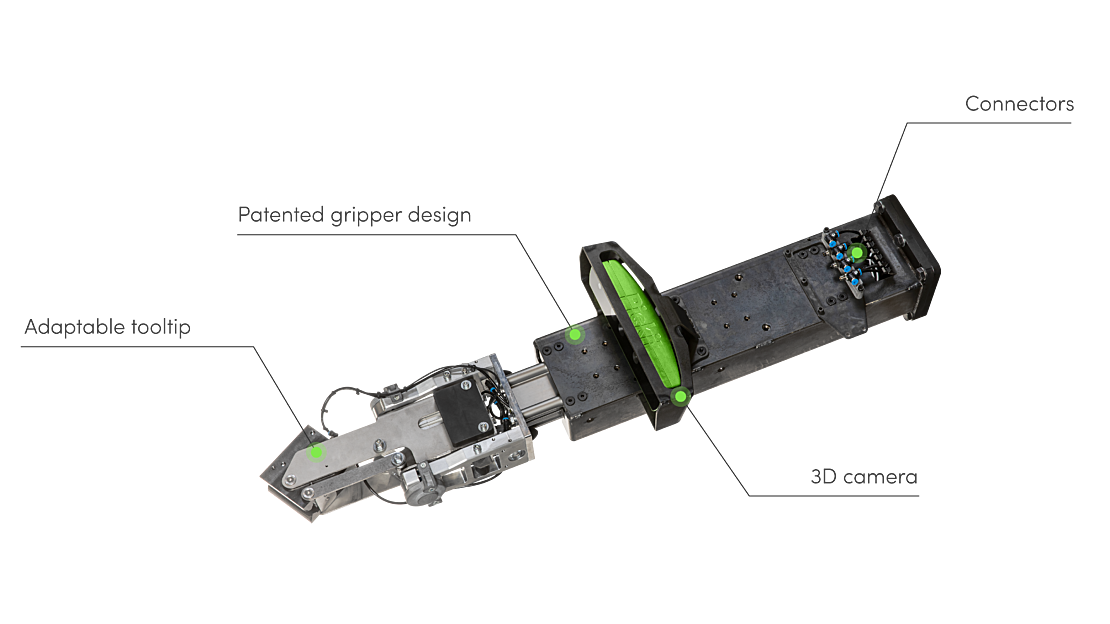
Der Knüppelpicker ist ein zusammengebautes End Of Arm Tooling (EOAT), das mit unserem Pickit 3D-Vision-System und billetspezifischer Software für Billethandling-Roboteranwendungen integriert ist. Sie müssen nicht zwischen Geschwindigkeit, Genauigkeit, Flexibilität und Kosten wählen – der Billet Picker erfüllt alle Anforderungen.
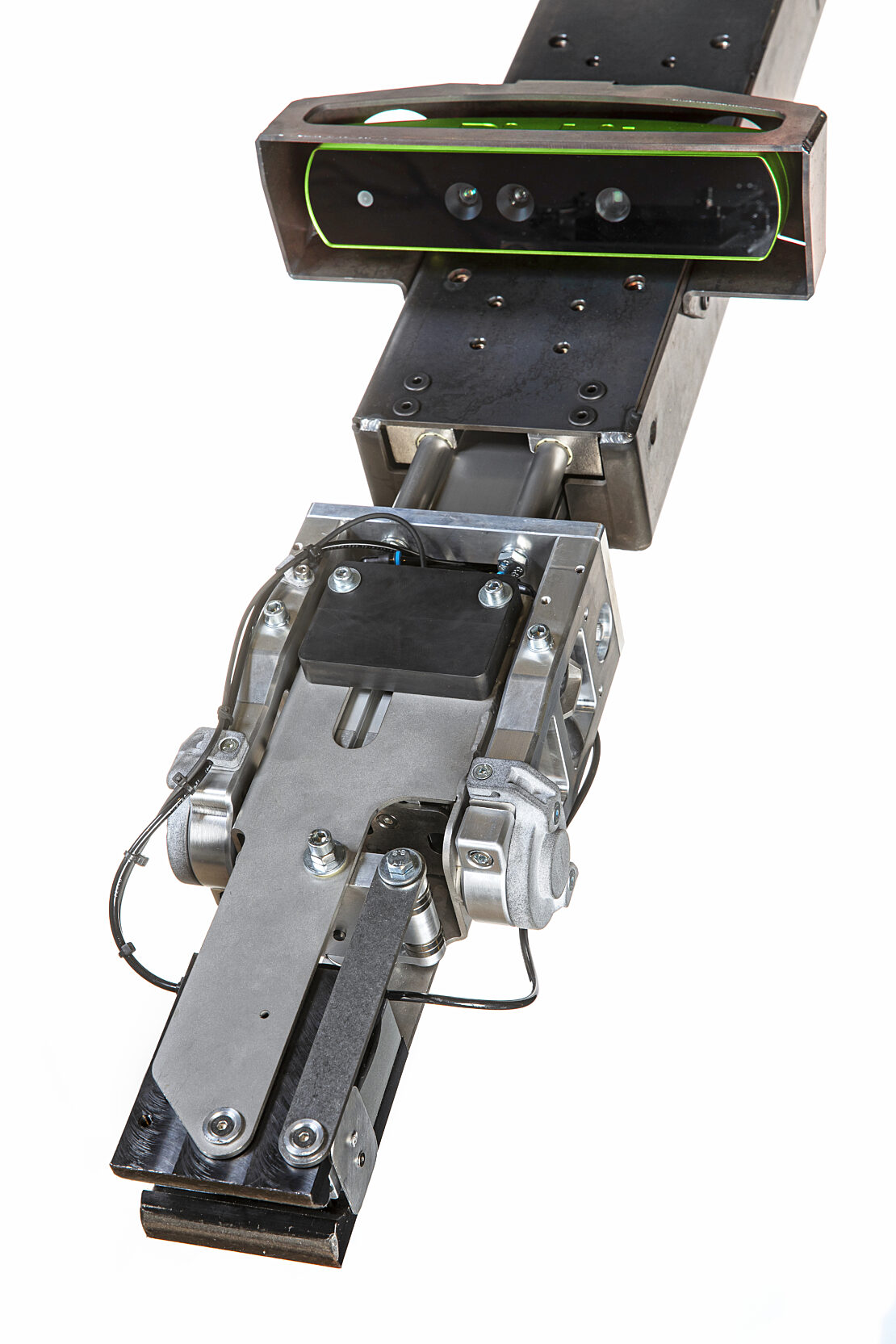
Innovativer Greifer
Der Billet-Picker-Greifer basiert auf dem Konzept eines anpassbaren Tooltip mit einem auf einer Rotationsachse montierten Magneten.
Dies ist eine zum Patent angemeldete Technologie und ein Schlüsselkonzept für diese Anwendung.
Dieses Konzept bringt folgende Vorteile mit sich:
Maximiert die Wahrscheinlichkeit, ein aufnehmbares Teil zu finden im Vergleich zu einem klassischen geraden oder schrägen Werkzeug. Das liegt daran, dass die Werkzeugspitze (in diesem Fall die Magnetfinger) jede Position innerhalb eines kontinuierlichen Bereichs zwischen -45 und +45 Grad einnehmen kann, anstatt nur eine (gerades Werkzeug) oder zwei (schräges/exzentrisches Werkzeug) diskrete Positionen.
Hilft, den benötigten Roboterarbeitsbereich und die Grundfläche für die Roboterzelle zu minimieren.
Vereinfacht die Picking-Bewegungen. Folglich ist keine Bewegungsplanungssoftware von Drittanbietern erforderlich. Der Roboter kann ohne zusätzliche Kosten in seiner Muttersprache programmiert werden.
Hilft dabei, teilweise blockierte Teile oder Teile in der Nähe einer Behälterwand zu extrahieren, da die Billets sich beim Hochziehen von den blockierenden Teilen oder der Behälterwand wegdrehen können.
Der Billet-Picker kann Billets unabhängig von ihrer Position im Behälter aufnehmen.Picken von Billets nicht nur von oben, sondern auch von den Seiten.Picken von Billets, die in den Ecken stecken bleiben.
Zusätzlich zu der anpassbaren Werkzeugspitze verfügt der Billet-Greifer über die folgenden Funktionen:
Ein aktiver Mechanismus zum Blockieren der anpassbaren Werkzeugspitze an einer festen, bekannten Position. Dies ermöglicht eine genaue Platzierung des Teils.
Der Greifer ist in Anfahrrichtung nachgiebig, um den Greifer und den Roboter bei gelegentlichen Kollisionen zu schützen. Die Nachgiebigkeit hat einen Hub von 5 cm und wird mit einer Vorspannung von 10 kg geliefert.
Der Greifer fungiert als Kamerahalter. Die Kamera kann starr an den Greifer montiert werden.
In der Werkzeugspitze ist ein Sensor integriert, der kontrolliert, ob ein Teil vom Greifer aufgenommen wird oder nicht.
Der Billet-Picker nimmt ein vergrabenes Billet auf und arretiert es fest für die weitere genaue Platzierung.
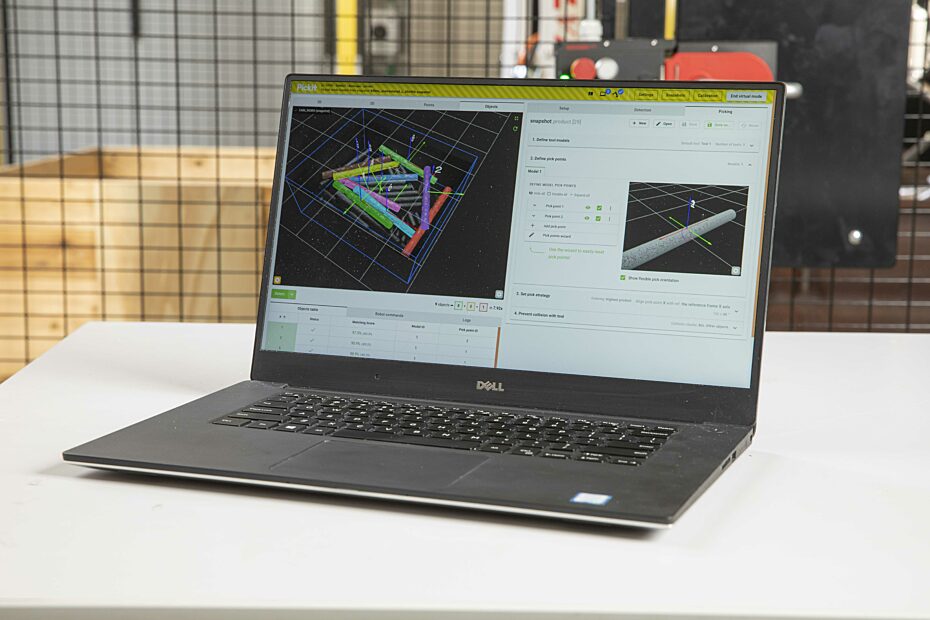
Billet-smarte Software
Der Billet-Picker EOAT von Pickit wird mit der Standard-Pickit-Software und einer vorkonfigurierten Vision-Engine für Billets geliefert. Sie müssen das Tool oder die Pipeline nicht mehr optimieren – Sie müssen keine CAD-Modelle hochladen Die Billet-Abmessung kann automatisch vom Roboter eingestellt werden. Die Konfiguration der Pick-Punkte erfolgt automatisch. Die Software- und Roboterschnittstelle ermöglicht die Einstellung der Billet-Abmessungen von der Roboter/SPS-Seite aus. Es ist nicht mehr nötig, dafür zwischen Produktdateien zu wechseln.
Vorkonfigurierte Vision-Engine für Billets.
Hat über 500.000 Picks durchgeführt, um die Zuverlässigkeit zu gewährleisten
Wir haben umfangreiche Tests durchgeführt, damit Sie sich Tag und Nacht auf einen unterbrechungsfreien Betrieb des Billet-Pickers verlassen können. Ein halbes Jahr lang haben wir Tausende von Behältern mit einer breiten Palette von Billets geleert und dabei die Zuverlässigkeit bis an die Grenze des beim Bin Picking Möglichen getrieben. Wir haben Dauertests für die Hardware und eine vollständige Prüfung der Umgebungslichtbedingungen für den Vision-Teil abgeschlossen. Wir haben eine Vision-Engine entwickelt, die den Anforderungen dieser Anwendung entspricht und die Konfiguration auf das absolute Minimum optimiert.
Alle Komponenten und die Software arbeiten nahtlos zusammen, so dass Sie die Vorteile der Roboterhandhabung in Ihrer Anlage wirklich nutzen können.
Der Billet-Picker Zuverlässigkeitstest. Ununterbrochener 24/7-Betrieb.
FAQ
Meine Billet-Größen liegen unter/über den Spezifikationen für den Billet-Picker. Können Sie es trotzdem lösen?
Ja. Wir haben mehrere Optionen, um mit sehr großen oder kleinen Billets zu arbeiten. Bitte kontaktieren Sie uns über das obige Formular.
Welche Roboter kann ich mit dem Billet-Picker verwenden?
Integrationen für ABB, KUKA, Fanuc und Yaskawa sind bereits verfügbar. Wenn Sie eine andere Robotermarke verwenden – bitte kontaktieren Sie uns.
Wird Pickit die Installation übernehmen?
Wir führen keine Installationen durch. Das müssen Sie selbst oder mit Hilfe eines Integrators tun. Für einige Regionen bieten wir jedoch zusätzliche Inbetriebnahmeservices vor Ort an.
Warum brauche ich einen Billet-Picker-Greifer? Kann ich nicht einfach ein Pickit 3D-Vision-System kaufen und den Greifer selbst entwerfen?
Mit dem Billet-Picker sparen Sie Zeit und Geld, da Sie keine komplette EOAT-Entwicklung durchlaufen müssen. Wir arbeiten seit 2016 mit Billet-Anwendungen. Wir haben viele Kämpfe auf Kundenseite mit der Konstruktion und dem Testen von Greifern gesehen, Iteration um Iteration, was den Einsatz von Roboterzellen um Monate verzögerte. Die Entwicklung eines guten Greifers für Billets hat uns ebenfalls viele Monate gekostet, und wir haben auch dafür gesorgt, dass er nahtlos mit der Kamera und der Software zusammenarbeitet. Wenn Sie es selbst machen, müssen Sie unsere Standardsoftware für die Anwendung der Billets feineinstellen.
Gibt es eine bevorzugte Behältergröße? Kann ich unsere eigenen Behälter weiter verwenden?
Sie können Ihre Behälter weiter verwenden, solange Sie sich innerhalb der Grenzen der obigen Behälterspezifikationen bewegen. Falls Ihr Behälter nicht gerade Wände hat (>2cm Abweichungen), empfehlen wir dringend, eine Blechplatte gegen die Innenseite der Behälterwand zu legen, um den Behälter innen zu begradigen.
Automatisierungsprojekte
Sehen Sie, wie andere mit Pickit automatisiert haben.