Case study: Smart manufacturing of bathroom fixtures
This is a case study of a bathroom fixtures manufacturer using a Pickit 3D Vision System to operate a buffer line.
Facing the problems
One of Europe's leading manufacturers of bathroom fixtures approached UNITEM company to robotize their workplace. The task is to load a workpiece – a tap – onto a CNC saw. It is tedious and monotonous work in an unfriendly environment near the casting machine, generating a very high temperature. The presence of an operator in this place is dangerous and uneconomical. The objective of the project is to remove the operator from this dangerous and uncomfortable environment and to eliminate the inefficiencies of the workflow.
Focus points
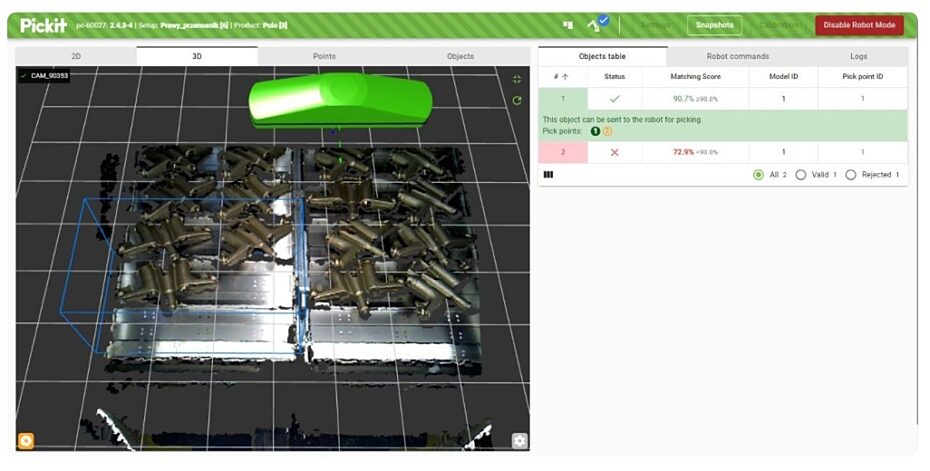
The task for the vision system is to distinguish between 5 tap references that are very often similar to each other. The solution, consequently, has to ensure loading the correct workpiece onto a CNC saw, handling the tap by the robot, and disposing of it on the CNC saw with high precision and accuracy. Any error could damage the saw, which can generate high costs due to downtime in production. The application also requires a large viewing area to cover two feeders with a total width of over 1500 mm. Keeping in mind all of the above, UNITEM, in cooperation with Pickit, offered a solution that met all of the requirements and simultaneously ensures ease of use and stability.
Implemented solution
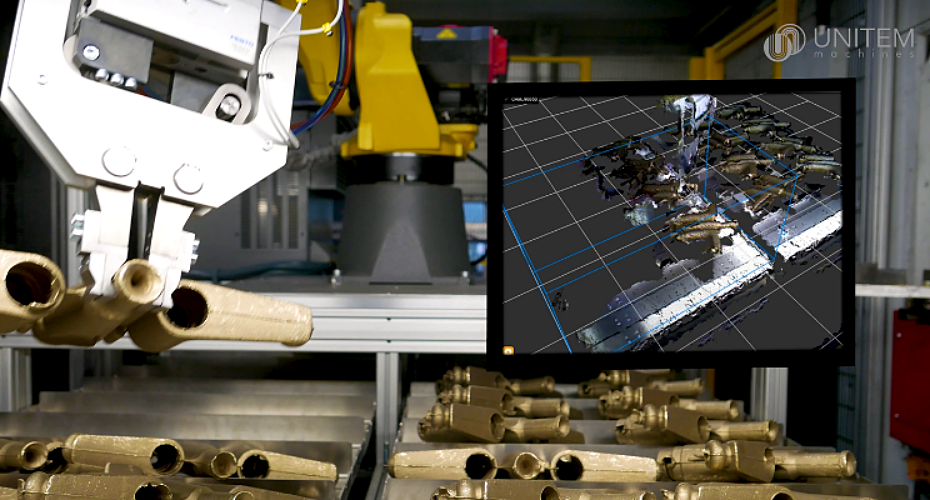
UNITEM integrated the Pickit 3D Vision System (L-model) with a FANUC M-20IA/35M robot and created a buffer line with automatic loading. Teaching the system to recognize the parts was a straightforward task – the Pickit Teach detection engine can search for objects based on an uploaded CAD file of the items. A 3D model of the gripper was created by UNITEM's designer. A well-designed tool and the Pickit 3D Vision system enabled the possibility to eliminate the second step, an intermediate position that ensures maximum accuracy. As a result, the customer benefits from a faster cycle time without giving up on the high accuracy.
Currently, the taps are put on two buffer conveyors by the operator so that the machine can run unattended for up to 60 minutes (100 workpieces). From there, the 3D vision system identifies the position of the workpiece on the conveyor belt and picks it up with the robot in a repeatable manner. The robot deposits the tap on the CNC saw's shaping cell. Once the part is in the shaping cell, the tap is processed by the saw.
Results
The implemented solution ensures the continuity of stable fixture production. The involvement of an operator is reduced. Therefore, he can spend time on more value-added tasks. Increased productivity is a significant benefit, yet not the only one related to minimizing the operator's contribution. The implemented solution increases safety by limiting exposure to high temperatures.
The Pickit system in this industrial machine works very well.It allows the tap to be reliably placed on the shaping cell for further processing by the CNC saw. The simplicity of the communication and the Fanuc - Pickit calibration are an exceptional experience. The integration of the systems went smoothly. The clarity and intuitive programming of the Pickit 3D Vision System was a great advantage for the end-user, who wants to expand the system themselves with further references shortly
Piotr Kaczmarek, Automation Specialist at UNITEM

