Welcome, Pickit 3.1: New and enhanced functionality focused on user-friendliness and your productivity.

We always make it our priority to make your life easier by achieving the optimal performance of your application with minimum effort from your side. We are aware that the stability and robustness of your implementation are crucial factors in building your success. Therefore, we introduced several improvements in the software that contribute to this. And of course, our hallmark remains the user-friendly experience of the system.
You don't have to worry about the stable performance of the robot cell for bin-picking, depalletization, or other robot guidance projects. With the latest upgrades, you can assure precise calibration, accurate pick, and have better insight into presented data. The 3.1 release focuses on the software side, but at the same time, we also take care of optimizing the hardware. That is why our robot-mounted cameras come with a new set of cables that are more resistant to bending and torsion than ever before.
Let’s take a closer look…
Easy and accurate calibration
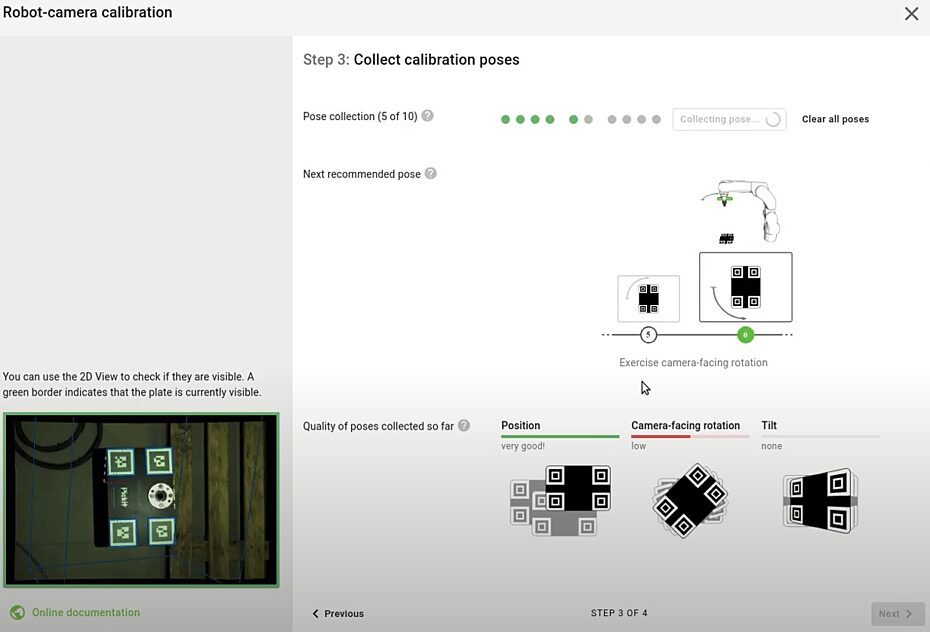
Inaccurate camera-robot calibration leads to a higher error rate. By using a new algorithm together with an enlarged number of calibration poses, the Pickit 3.1 release eliminates most calibration errors. What does it mean? We will guide you through the pose collection process step by step. Recommended poses are presented as a step-by-step sequence. And what is more important, you get live feedback on the quality of the poses. As a result, you don't have to worry about inaccurate calibration after-effects.
Enlarged collision environment
Ensure a flawless run of the application by preventing the robot tool from colliding with the bin or other obstacles. With the recent upgrade, you can define more complex bins in your collision environment, such as bins with handles and slanted bins. Enlarged possibilities of the collision environment feature will help prevent unwanted crashes that can lead to irruptions.
Last objects sent to the robot
Pickit 3.1 allows you to keep track of the last object sent to the robot. It is highlighted in the viewer, where the robot icon is shown next to it in the objects table. This feature visualizes if the camera box is well-positioned for the camera on the robot. As a result, you have a better insight when the object is unreachable and goes for another part.

Less visual clutter in the web interface
We further improved the intuitiveness of the software. The new web interface reduces visual clutter in a few key places. All available settings are divided into four main categories. This way, you can easily find a required option that needs to be modified or optimized.
Automatic camera profile download
We also made our support process easier. You don't need to bring your processor online any longer to replace or add the camera profile. The process is now straightforward and consists of a single click if the computer you use to open the web interface has Internet access. Thanks to this, you can count on the easy process of receiving the camera profile sent to you by our support team.
Get the update
If you have an older Pickit version and would like to try 3.1, check out how you can upgrade your system.
Got questions?
Read 3.1 release notes in full detail or ask us anything on Pickit's 3.1 release by filling out the form below.
