모든 단조 플랜트를 현대화하는 빌렛 핸들링 솔루션
기계 장비를 빌렛 피커(Billet Picker)와 로봇으로 교체:
-
부피가 크고 시끄러운 진동 피더소음이 없고, 적은 공간을 차지하는 빌렛 플로우
-
높은 유지보수 비용높은 내구성 및 낮은 유지보수성
-
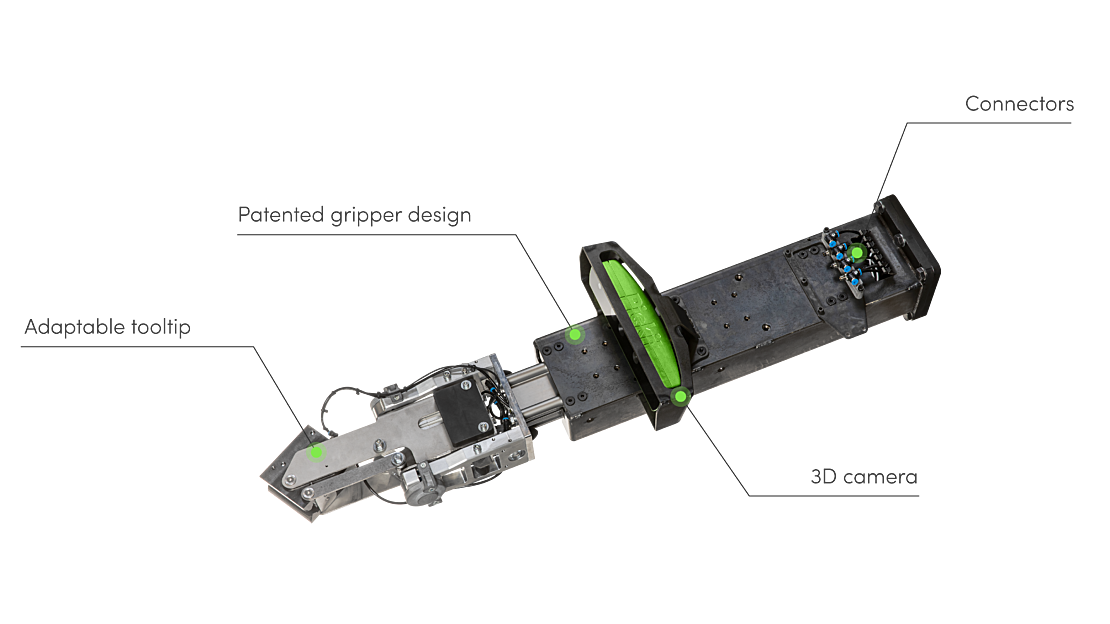
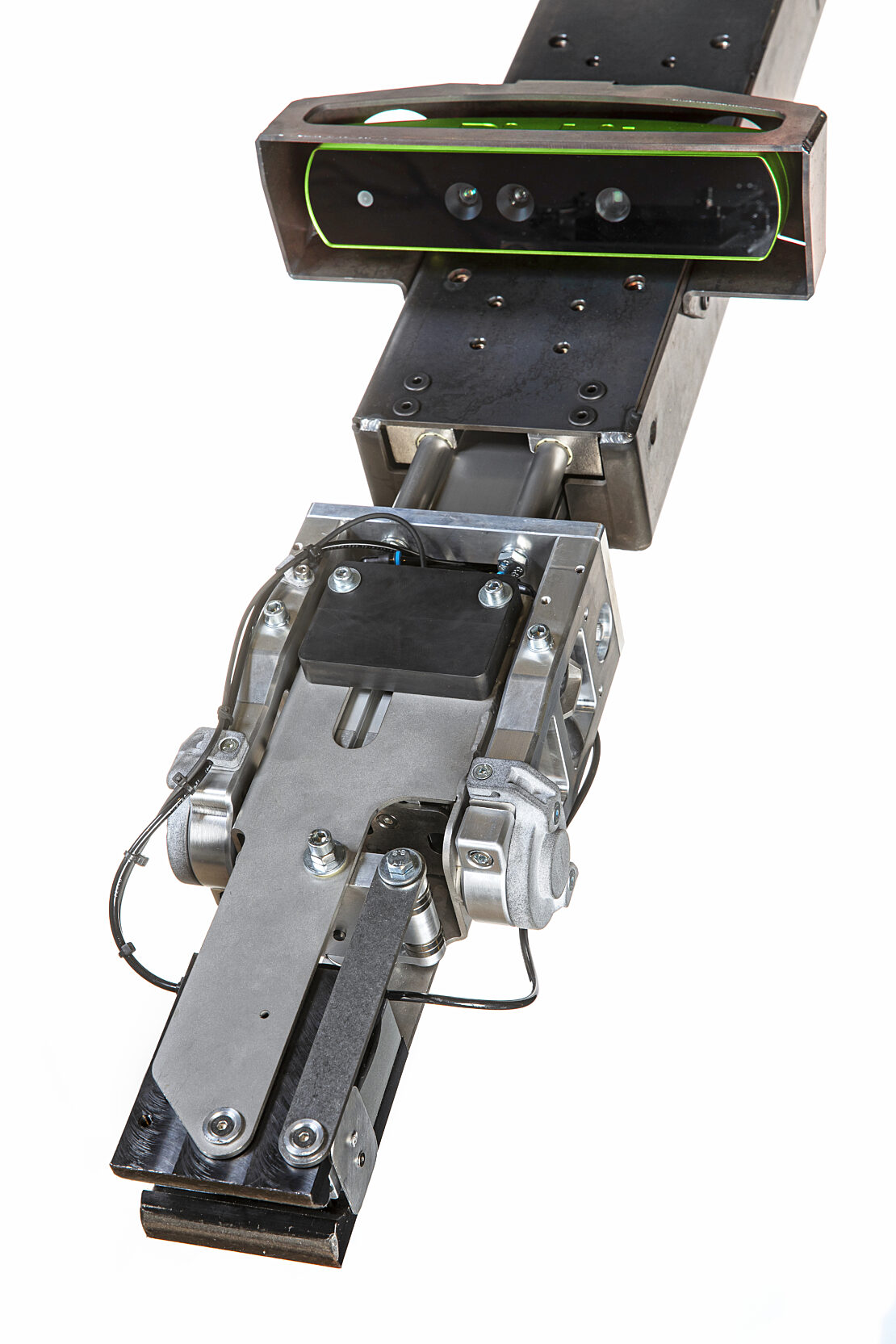
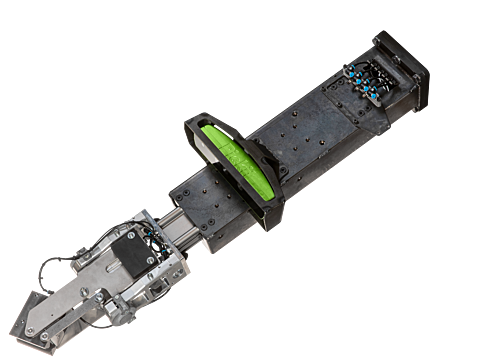
맞춤형 디자인 및 통합그리퍼 설계와 통합 작업 비용 절감
Use cases
-


프랑스 Colin Milas 단조
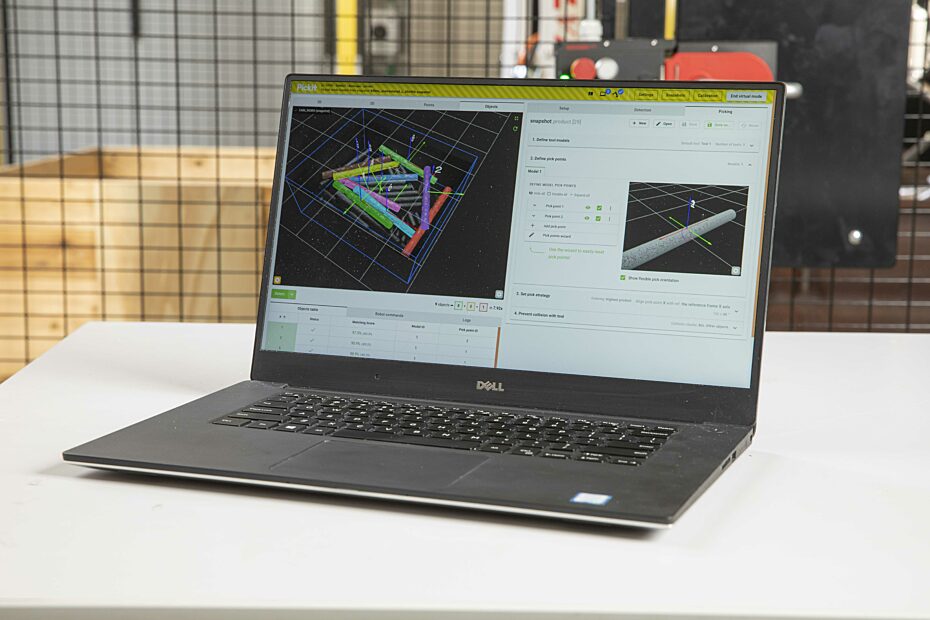
Colin Milas는 퍼니스 공급용으로 빈에서 빌렛을 집어서 인피드 컨베이어에 올려 놓는 로봇을 Pickit 비전과 함께 설치했습니다. 로봇은 15초마다 빌렛 한 개를 전달하며 오븐 사이클 타임 요건인 30초를 충분히 만족합니다.
비디오 보기
전 세계의 단조 공장은 인덕션 오븐의 일정한 피딩이 필수적입니다. 지난 수십 년 간, 기계적 피딩 자동화는 이 업계가 의존할 수 있는 단 한 가지 솔루션이었습니다. 그러나 기계적 빌렛 피더는 크며, 시끄럽고, 유지하는 데 높은 비용이 소요됩니다. 로봇공학과 비전기술의 진보 및 단조 빈피킹 문제를 해결하기 위한 당사의 헌신적인 노력으로 Pickit은 그리퍼와 카메라를 통합하여 새로운 솔루션을 출시하여 로봇 셀이 쉽게 설치되고 바로 작업을 수행할 수 있게 하였습니다.